Jurik Adaptive Moving AverageThis is Jurik Research's original moving average and a predecessor of the well-known Jurik Moving Average (JMA). It was developed by Mark Jurik in 1994. The purpose was the same: to create the best noise reduction filter.
The algorithms of JAMA and JMA have big differences. JAMA is less responsive than JMA - sometimes it makes it better than JMA but closely depends on the objective assigned to it.
On the screenshots you can see how they behave together with different period settings.
The red line is JAMA, the purple line is JMA .
Period: 7
BTCUSD, D
AAPL, D
Period: 14
BTCUSD, D
AAPL, D
Period: 50
BTCUSD, D
AAPL, D
Reference: www.jurikres.com
Zerolag

Well Rounded Moving AverageIntroduction
There are tons of filters, way to many, and some of them are redundant in the sense they produce the same results as others. The task to find an optimal filter is still a big challenge among technical analysis and engineering, a good filter is the Kalman filter who is one of the more precise filters out there. The optimal filter theorem state that : The optimal estimator has the form of a linear observer , this in short mean that an optimal filter must use measurements of the inputs and outputs, and this is what does the Kalman filter. I have tried myself to Kalman filters with more or less success as well as understanding optimality by studying Linear–quadratic–Gaussian control, i failed to get a complete understanding of those subjects but today i present a moving average filter (WRMA) constructed with all the knowledge i have in control theory and who aim to provide a very well response to market price, this mean low lag for fast decision timing and low overshoots for better precision.
Construction
An good filter must use information about its output, this is what exponential smoothing is about, simple exponential smoothing (EMA) is close to a simple moving average and can be defined as :
output = output(1) + α(input - output(1))
where α (alpha) is a smoothing constant, typically equal to 2/(Period+1) for the EMA.
This approach can be further developed by introducing more smoothing constants and output control (See double/triple exponential smoothing - alpha-beta filter) .
The moving average i propose will use only one smoothing constant, and is described as follow :
a = nz(a ) + alpha*nz(A )
b = nz(b ) + alpha*nz(B )
y = ema(a + b,p1)
A = src - y
B = src - ema(y,p2)
The filter is divided into two components a and b (more terms can add more control/effects if chosen well) , a adjust itself to the output error and is responsive while b is independent of the output and is mainly smoother, adding those components together create an output y , A is the output error and B is the error of an exponential moving average.
Comparison
There are a lot of low-lag filters out there, but the overshoots they induce in order to reduce lag is not a great effect. The first comparison is with a least square moving average, a moving average who fit a line in a price window of period length .
Lsma in blue and WRMA in red with both length = 100 . The lsma is a bit smoother but induce terrible overshoots
ZLMA in blue and WRMA in red with both length = 100 . The lag difference between each moving average is really low while VWRMA is way more precise.
Hull MA in blue and WRMA in red with both length = 100 . The Hull MA have similar overshoots than the LSMA.
Reduced overshoots moving average (ROMA) in blue and WRMA in red with both length = 100 . ROMA is an indicator i have made to reduce the overshoots of a LSMA, but at the end WRMA still reduce way more the overshoots while being smoother and having similar lag.
I have added a smoother version, just activate the extra smooth option in the indicator settings window. Here the result with length = 200 :
This result is a little bit similar to a 2 order Butterworth filter. Our filter have more overshoots which in this case could be useful to reduce the error with edges since other low pass filters tend to smooth their amplitude thus reducing edge estimation precision.
Conclusions
I have presented a well rounded filter in term of smoothness/stability and reactivity. Try to add more terms to have different results, you could maybe end up with interesting results, if its the case share them with the community :)
As for control theory i have seen neural networks integrated to Kalman flters which leaded to great accuracy, AI is everywhere and promise to be a game a changer in real time data smoothing. So i asked myself if it was possible for a neural networks to develop pinescript indicators, if yes then i could be replaced by AI ? Brrr how frightening.
Thanks for reading :)

Linear Quadratic Convergence Divergence OscillatorIntroduction
I inspired myself from the MACD to present a different oscillator aiming to show more reactive/predictive information. The MACD originally show the relationship between two moving averages by subtracting one of fast period and another one of slow period. In my indicator i will use a similar concept, i will subtract a quadratic least squares moving average with a linear least squares moving average of same period, since the quadratic least squares moving average is faster than the linear one and both methods have low-lag this will result in a reactive oscillator.
LQCD In Details
A quadratic least squares moving average try to fit a quadratic function (parabola) to the price by using the method of least squares, the linear least squares moving average try to fit a line. Non-linear fit tend to minimize the sum of squares in non-linear data, this is why a quadratic method is more reactive. The difference of both filters give us an oscillator, then we apply a simple moving average to this oscillator to provide the signal line, subtracting the oscillator and its signal line give us the histogram, those two last steps are the same used in the MACD.
Length control the period of the quadratic/linear moving average. While the MACD use a signal line for plotting the histogram i also added the option to plot the momentum of the quadratic moving average instead, the result is smoother and reduce irregularities, in order to do so just check the differential option in the parameter box.
The period of the signal line and the momentum are both controlled by the signal parameter.
A predictive approach can be made by subtracting the histogram with the signal line, this process make the histogram way more predictive, in order to do so just check the predictive histogram option in the parameter box.
Predictive histogram with simple histogram option. The differential mode can also be used with the predictive parameter, this result in a smoother but less reactive prediction.
Information Interpretation
The amount of information the MACD can give us is high. We can use the histogram as signal generator, or the if the oscillator is over/under 0, combine the oscillator/signal line with histogram, combinations can provide various systems. Some traders use the histogram as signal generator and use the cross between the histogram and the signal line as a stop signal, this method can avoid some whipsaw trades. The study of divergences with the price is also another method.
Conclusion
This oscillator aim to show the same amount of information as the MACD with a similar calculation method but using different kind of filters as well as eliminating the need to use two separates periods for the moving averages calculation, its still possible to use different periods for the quadratic/linear moving average but the results can be less accurate. This indicator can be used like the MACD.

Least Squares Moving Average With Overshoot ReductionIntroduction
The ability to reduce lag while keeping a good level of stability has been a major challenge for smoothing filters in technical analysis. Stability involve many parameters, one of them being overshoots. Overshoots are a common effect induced by low-lagging filters, they are defined as the ability of a signal output to exceed a target input. This effect can lead to major drawbacks such as whipsaw and reduction of precision. I propose a modification of the least squares moving average "Reduced Overshoots Moving Average" (ROMA) to reduce overshoots induced by the lsma by using a scaled recursive dispersion coefficient with the purpose of reducing overshoots.
Overshoots - Causes and Effects
Control theory and electronic engineering use step response to measure overshoots, the target signal is defined as an heaviside step function which will be used as input signal for our filter.
In white an input signal, in blue a least squares moving average with the input signal as source, the circle show the overshoot induced by the lsma, the filter exceed drastically the target input. But why low lag filters often induce overshoots ? This is because in order to reduce lag those filter will increase certain frequencies of the input signal, this reduce lag but induce overshoots because the amplitude of those frequencies have been increased, so its normal for the filter to exceed the input target. The increase of frequencies is not a bad process but when those frequencies are already of large amplitudes (high volatility periods) the overshoots can be seen.
Comparison With ROMA
Our method will use the line rescaling technique to estimate the lsma for efficiency sake. This method involve calculating the z-score of a line and multiplying it by the correlation of the line and the target input (price). Then we rescale this result by adding this z-score multiplied by the dispersion coefficient to a simple moving average. Lets compare the step response of our filer and the lsma.
ROMA (in red) need more data to be computed but reduce the mean absolute error in comparison with the classic lsma, it is seen that instead of following increasing, ROMA decrease thus ending with an undershoot.
ROMA in (red) and an lsma (in blue) with both length = 14, ROMA decrease overshoots with the cost of less smoothing, both filter match when there are no overshoots situations.
Both filters with length = 200, large periods increase the amplitude of overshoots, ROMA stabilize early at the cost of some smoothness.
The running Mean Absolute Error of both filters with length = 100, ROMA (in red) is on average closer to the price than the lsma (in blue)
Conclusion
I presented a modification of the least squares moving average with the goal to provide both stability and rapidity, the statistics show that ROMA do a better job when it comes to reduce the mean absolute error. Alternatives methods can involve decreasing the period it take for the filter to be on a steady state (reducing filter period during high volatility periods) , various filters already exploit this method.
Side Project
I'am not that good when it come to make my post easy to read, this is why i'am currently making an article explaining the basis of digital signal processing. This post will help you to understand signals and things such as lag, frequency transform, cycles, overshoots, ringing, FIR/IIR filters, impulse response, convolution, filter topology and many more. I love to post indicators but also making more educational content as well, so stay tuned :)
Thanks for reading, let me know if you need help with something, i would be happy to assist you.
please be kind to notify me if you find errors about the indicator in order for me to update it as fast as possible.

Multi Poles Zero-Lag Exponential Moving AverageIntroduction
Based on the exponential averaging method with lag reduction, this filter allow for smoother results thanks to a multi-poles approach. Translated and modified from the Non-Linear Kalman Filter from Mladen Rakic 01/07/19 www.mql5.com
The Indicator
length control the amount of smoothing, the poles can be from 1 to 3, higher values create smoother results.
Difference With Classic Exponential Smoothing
A classic 1 depth recursion (Single smoothing) exponential moving average is defined as y = αx + (1 - α)y which can be derived into y = y + α(x - y )
2 depth recursion (Double smoothing) exponential moving average sum y with b in order to reduce the error with x , this method is calculated as follow :
y = αx + (1 - α)(y + b)
b = β(y - y ) + (1-β)b
The initial value for y is x while its 0 for b with α generally equal to 2/(length + 1)
The filter use a different approach, from the estimation of α/β/γ to the filter construction.The formula is similar to the one used in the double exponential smoothing method with a difference in y and b
y = αx + (1 - α)y
d = x - y
b = (1-β)b + d
output = y + b
instead of updating y with b the two components are directly added in a separated variable. Poles help the transition band of the frequency response to get closer to the cutoff point, the cutoff of an exponential moving average is defined as :
Cf = F/2π acos(1 - α*α/(2(1 - α)))
Also in order to minimize the overshoot of the filter a correction has been added to the output now being output = y + 1/poles * b
While this information is far being helpful to you it simply say that poles help you filter a great amount of noise thus removing irregularities of the filter.
Conclusion
The filter is interesting and while being similar to multi-depth recursion smoothing allow for more varied results thanks to its 3 poles.
Feel free to send suggestions :)
Thanks for reading

Fibo Guppy Multi MA RevisedThis is Guppy MA i customized for myself based on two scripts of GMMA from JustUncleL and NeoButane.
Its features are:
1. Besides standard EMA you can chose all kinds of exotic moving average types ike ALMA (my favorite), HullMA, ZeroLag EMA, VWMA, KAMA etc...
2. Two types of coloring scheme - depends on volatility try one that's best fit.
3. Multiple sets of predefined lengths: standard Guppy 3-60, Fibonacci based lengths 3-610, Fibo 5-987 and Custom (user defined lengths)

General Filter Estimator-An Experiment on Estimating EverythingIntroduction
The last indicators i posted where about estimating the least squares moving average, the task of estimating a filter is a funny one because its always a challenge and it require to be really creative. After the last publication of the 1LC-LSMA , who estimate the lsma with 1 line of code and only 3 functions i felt like i could maybe make something more flexible and less complex with the ability to approximate any filter output. Its possible, but the methods to do so are not something that pinescript can do, we have to use another base for our estimation using coefficients, so i inspired myself from the alpha-beta filter and i started writing the code.
Calculation and The Estimation Coefficients
Simplicity is the key word, its also my signature style, if i want something good it should be simple enough, so my code look like that :
p = length/beta
a = close - nz(b ,close)
b = nz(b ,close) + a/p*gamma
3 line, 2 function, its a good start, we could put everything in one line of code but its easier to see it this way. length control the smoothing amount of the filter, for any filter f(Period) Period should be equal to length and f(Period) = p , it would be inconvenient to have to use a different length period than the one used in the filter we want to estimate (imagine our estimation with length = 50 estimating an ema with period = 100) , this is where the first coefficients beta will be useful, it will allow us to leave length as it is. In general beta will be greater than 1, the greater it will be the less lag the filter will have, this coefficient will be useful to estimate low lagging filters, gamma however is the coefficient who will estimate lagging filters, in general it will range around .
We can get loose easily with those coefficients estimation but i will leave a coefficients table in the code for estimating popular filters, and some comparison below.
Estimating a Simple Moving Average
Of course, the boxcar filter, the running mean, the simple moving average, its an easy filter to use and calculate.
For an SMA use the following coefficients :
beta = 2
gamma = 0.5
Our filter is in red and the moving average in white with both length at 50 (This goes for every comparison we will do)
Its a bit imprecise but its a simple moving average, not the most interesting thing to estimate.
Estimating an Exponential Moving Average
The ema is a great filter because its length times more computing efficient than a simple moving average. For the EMA use the following coefficients :
beta = 3
gamma = 0.4
N.B : The EMA is rougher than the SMA, so it filter less, this is why its faster and closer to the price
Estimating The Hull Moving Average
Its a good filter for technical analysis with tons of use, lets try to estimate it ! For the HMA use the following coefficients :
beta = 4
gamma = 0.85
Looks ok, of course if you find better coefficients i will test them and actualize the coefficient table, i will also put a thank message.
Estimating a LSMA
Of course i was gonna estimate it, but this time this estimation does not have anything a lsma have, no moving average, no standard deviation, no correlation coefficient, lets do it.
For the LSMA use the following coefficients :
beta = 3.5
gamma = 0.9
Its far from being the best estimation, but its more efficient than any other i previously made.
Estimating the Quadratic Least Square Moving Average
I doubted about this one but it can be approximated as well. For the QLSMA use the following coefficients :
beta = 5.25
gamma = 1
Another ok estimate, the estimate filter a bit more than needed but its ok.
Jurik Moving Average
Its far from being a filter that i like and its a bit old. For the comparison i will use the JMA provided by @everget described in this article : c.mql5.com
For the JMA use the following coefficients :
for phase = 0
beta = pow*2 (pow is a parameter in the Jma)
gamma = 0.5
Here length = 50, phase = 0, pow = 5 so beta = 10
Looks pretty good considering the fact that the Jma use an adaptive architecture.
Discussion
I let you the task to judge if the estimation is good or not, my motivation was to estimate such filters using the less amount of calculations as possible, in itself i think that the code is quite elegant like all the codes of IIR filters (IIR Filters = Infinite Impulse Response : Filters using recursion) .
It could be possible to have a better estimate of the coefficients using optimization methods like the gradient descent. This is not feasible in pinescript but i could think about it using python or R.
Coefficients should be dependant of length but this would lead to a massive work, the variation of the estimation using fixed coefficients when using different length periods is just ok if we can allow some errors of precision.
I dont think it should be possible to estimate adaptive filter relying a lot on their adaptive parameter/smoothing constant except by making our coefficients adaptive (gamma could be)
So at the end ? What make a filter truly unique ? From my point of sight the architecture of a filter and the problem he is trying to solve is what make him unique rather than its output result. If you become a signal, hide yourself into noise, then look at the filters trying to find you, what a challenging game, this is why we need filters.
Conclusion
I wanted to give a simple filter estimator relying on two coefficients in order to estimate both lagging and low-lagging filters. I will try to give more precise estimate and update the indicator with new coefficients.
Thanks for reading !

1LC-LSMA (1 line code lsma with 3 functions)Even Shorter Estimation
I know that i'am insistent with the lsma but i really like it and i'm happy to deconstruct it like a mad pinescript user. But if you have an idea about some kind of indicator then dont hesitate to contact me, i would be happy to help you if its feasible.
My motivation for such indicator was to use back the correlation function (that i had putted aside in the ligh-lsma code) and provide a shorter code than the estimation using the line rescaling method (see : Approximating A Least Square Moving Average In Pine) .
The Method
Fairly simple, lets name y our estimation, we calculate it as follow:
y = x̄ + r*o*1.7
where x̄ is the price moving average, r the correlation between the price and a line (or n) and o the standard deviation. If plotted against a classic lsma the difference would be meaningless at first glance so lets plot the absolute value between the difference of the lsma and our estimation of both period 100.
The difference is under 0.0000 on eurusd, its really low.
In general the longer the period of the estimation, the lower the difference between a normal lsma, but when using shorter period they can differ a little bit.
Why 1.7 ?
We need to multiply the standard deviation by a constant in order to match the overshoot and the rise-time of the original lsma. The constant 1.7 is one that work well but actually this constant should be dependant of the length period of the filter to make the estimation more accurate.
More About Step-Response
Most of the time when a filter have less lag, it mean that he induce overshoot in order to decrease the rise-time . Rise-time is the time the output take to match the target input, its related to the lag. Overshoot mean that the output exceed the target input, you can clearly see those concept in the image above.
Conclusion
I've showed that its possible to be even more concise about the code it take to estimate an lsma. I've also briefly explained the concept of rise-time and overshoot, concepts really important to signal processing and particularly in filter design. I'm sure that it can be even more simplified and i have some ideas for such estimate.
Thanks for reading !

Adaptive Zero Lag EMA [STUDY]A user has asked for the Study/Indicator version of this Strategy .
If you encounter the error "loop....>100ms" simply toggle the eye icon to hide and unhide the indicator
The following is simply quoted from my previous post for your convenience: (obviously there won't be risk, Stop Loss, or Take profit parameters!)
OPERATING PRINCIPLE
The strategy is based on Ehlers idea that any indicator can be turned into a signal-producing trade system through smoothing and other filtering processes.
In fact, I'm using his Zero Lag EMA ( ZLEMA ) as a baseline indicator as well as some code snippets he has made public (1). God bless open source!
Next, I've provided the option to use an Instantaneous Frequency Measurement (IFM) method, which will adaptively choose the best period for the ZLEMA (2)
I've written other studies that use the differential calculus approximations for IFM, so it was only natural to include them in this strategy.
The primary two are Cosine IFM (3) and In-phase Quadrature IFM (4). You can also find an indicator with both plotted and the ability to average them together, as one IFM prefers long periods and the other short. (5)
BEFORE WE BEGIN
1. This strategy only runs on "normal" FX pairs ( EURUSD , GBPJPY , AUDUSD ...) and will fail on Metals or Commodities.
Cryptos are largely untested.
2. Please run it on these time frames: M15 to D.
Anything outside this range will likely fail.
HOW TO USE AND SUCCEED
1. If the Default settings don't produce good results right off the bat, then lower gain limit to 1 or 2 and threshold to 0.01.
2. Test each setting under adaptive method. If you want to leave it Off, then I'd recommend using some kind of IFM (see my links below) to
discover the most efficient period to use.
3. Once you have the best adaptive method chosen, begin incrementing gain limit until you find a nice balance between profit factor ( PF ) and drawdown.
4. Now, begin incrementing threshold. The goal is to have PF above 2 and a drawdown as low as possible.
5. Finally, change the source! Typically, close is the best option, but I have run into cases where high
yielded the highest returns and win rate.
6. Sit back, relax, and tweak the risk until you're happy with the return and drawdown amounts.
ADVANCED
You may need to adjust take profit (TP) points and stop loss (SL) points to create the best entry possible. Don't be greedy! You'll likely have poor
results if the TP is set to 300 and SL is 50.
If you are trading a pair that has a long Dominant Cycle Period, then you may increase Max Period to allow the IFM
to accept longer periods. Any period above the Max Period will be rejected. This may increase lag time!
Cheers and good luck trading!
-DasanC
(1)www.mesasoftware.com
(2)www.jamesgoulding.com
(3) Cosine IFM
(4) I-Q IFM
(5) Averaging IFM
IFM stands for Instantaneous frequency measurement

Zero Lag KAMA based CCIExperiment that uses an (optional) Zero Lag adjustment and KAMA instead of the default SMA to calculate the CCI.

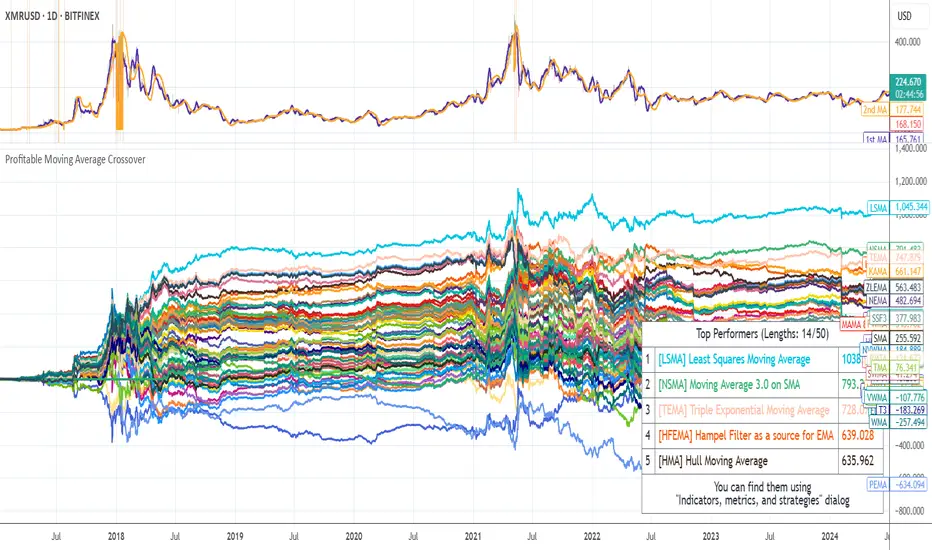
Profitable Moving Average CrossoverHi everyone!
Introduction
A popular use for moving averages is to develop simple trading systems based on moving average crossovers. A trading system using two moving averages would give a buy signal when the shorter (faster) moving average advances above the longer (slower) moving average. A sell signal would be given when the shorter moving average crosses below the longer moving average. The speed of the systems and the number of signals generated will depend on the length of the moving averages.
There are many types of averages that are based on different techniques. Each type has its drawbacks and merits. And if we decide to choose a certain type of average for the trading system, then how do we know that our choice is optimal?
What is this tool?
This tool will help you to choose this type to create the most profitable trading system based on crossovers for the specified periods. It backtests pairs of each type throughout the whole instrument's history and shows Net Profit curves as a result. So, the type of the most profitable crossover system will be at the top of list of labels on the chart. (Click on the price scale, point to "Labels" and switch off "No Overlapping Labels" option).
Settings
The main settings are periods for each type pair of fast and slow moving averages.
Additionally, it allows to customize some multi-parametric moving averages such as JMA, ALMA, McGinley Dynamic, Adaptive Laguerre Filter etc.
1st Period (default: 14 )
2nd Period (default: 50 )
1st ALF Median Length (default: 5 )
2nd ALF Median Length (default: 5 )
1st ALMA Offset (default: 0.85 )
1st ALMA Sigma (default: 6 )
2nd ALMA Offset (default: 0.85 )
2nd ALMA Sigma (default: 6 )
1st HF Scaling Factor (default: 3 )
2nd HF Scaling Factor (default: 3 )
1st JMA Phase (default: 50 )
2nd JMA Phase (default: 50 )
1st MD Constant (default: 0.6 )
2nd MD Constant (default: 0.6 )
1st MHLMA Range (default: 10 )
2nd MHLMA Range (default: 10 )
1st PWMA Power (default: 2 )
2nd PWMA Power (default: 2 )
1st REMA Lambda (default: 0.5 )
2nd REMA Lambda (default: 0.5 )
1st RMF Median Length (default: 5 )
2nd RMF Median Length (default: 5 )
1st T3 Alpha (default: 0.7 )
2nd T3 Alpha (default: 0.7 )
MAMA & FAMA Fast Limit (default: 0.5 )
MAMA & FAMA Slow Limit (default: 0.05 )
Supported types of averages and filters (use short titles to match averages on the chart)
AHMA , Ahrens MA (by Richard D. Ahrens)
ALMA , Arnaud Legoux MA (by Arnaud Legoux and Dimitris Kouzis-Loukas)
ALF , Adaptive Laguerre Filter (by John F. Ehlers)
ARSI , Adaptive RSI
BF2 , Butterworth Filter with 2 poles
BF3 , Butterworth Filter with 3 poles
DEMA , Double Exponential MA (by Patrick G. Mulloy)
DWMA , Double Weighted (Linear) MA
EDCF , Ehlers Distance Coefficient Filter (by John F. Ehlers)
EHMA , Exponential Hull MA
EMA , Exponential MA
EVWMA , Elastic Volume Weighted MA (by Christian P. Fries)
FRAMA , Fractal Adaptive MA (by John F. Ehlers)
GF1 , Gaussian Filter with 1 pole
GF2 , Gaussian Filter with 2 poles
GF3 , Gaussian Filter with 3 poles
GF4 , Gaussian Filter with 4 poles
HFSMA , Hampel Filter on Simple Moving Average
HFEMA , Hampel Filter on Exponential Moving Average
HMA , Hull MA (by Alan Hull)
HWMA , Henderson Weighted MA (by Robert Henderson)
IDWMA , Inverse Distance Weighted MA
IIRF , Infinite Impulse Response Filter (by John F. Ehlers)
JMA , Jurik MA (by Mark Jurik, )
LF , Laguerre Filter (by John F. Ehlers)
LMA , Leo MA (by ProRealCode' user Leo)
LSMA , Least Squares MA (Moving Linear Regression)
MAMA & FAMA , (by John F. Ehlers, special case that used as a benchmark)
MD , McGinley Dynamic (by John R. McGinley)
MHLMA , Middle-High-Low MA (by Vitali Apirine)
PWMA , Parabolic Weighted MA
REMA , Regularized Exponential MA (by Chris Satchwell)
RMA , Running MA (by J. Welles Wilder)
RMF , Recursive Median Filter (by John F. Ehlers)
RMTA , Recursive Moving Trend Average (by Dennis Meyers)
SHMMA , Sharp Modified MA (by Joe Sharp)
SMA , Simple MA
SSF2 , Super Smoother Filter with 2 poles (by John F. Ehlers)
SSF3 , Super Smoother Filter with 3 poles (by John F. Ehlers)
SWMA , Sine Weighted MA
TEMA , Triple Exponential MA (by Patrick G. Mulloy)
TMA , Triangular MA (generalized by John F. Ehlers)
T3 , (by Tim Tillson)
VIDYA , Variable Index Dynamic Average (by Tushar S. Chande)
VWMA , Volume Weighted MA (by Buff P. Dormeier)
WMA , Weighted (Linear) MA
ZLEMA , Zero Lag Exponential MA (by John F. Ehlers and Ric Way)
NOTE : The results may vary on different tickers and timeframes.
If you see the preview result it doesn't mean that these crossovers will be profitable on other instruments and timeframes. This is a normal situation because time series and their characteristics differ.
I know that because I tested this tool before publishing.
NOTE 2 : You can use this tool by yourself and experiment with it, or you can order a study and I will share the spreadsheet that contains results with you.
Good luck!
Jurik RSXAdopted to Pine from www.prorealcode.com .
I haven't yet understood the details of the algorithm but it matches the original Jurik's RSX one to one.
Jurik's RSX is a "noise free" version of RSI, with no added lag. To learn more about this indicator see www.jurikres.com .
Good luck!

Zerolag KAMA MACDExperimental Zero Lag Adjusted KAMA based MACD.
Uses Kaufman's Adaptive Moving Average (KAMA) instead of the standard EMAs to calculate the MACD with an optional application of the zero lag adjustment.
Significant differences in momentum changes (zero line crossovers), often earlier signal line crossovers and differences in divergences.
Chart displays :
Top : Zero lag adjusted KAMA based MACD
Middle : Unadjusted KAMA based MACD
Bottom : Standard MACD

Kalman SmootherA derivation of the Kalman Filter.
Lower Gain values create smoother results.The ratio Smoothing/Lag is similar to any Low Lagging Filters.
The Gain parameter can be decimal numbers.
Kalman Smoothing With Gain = 20
For any questions/suggestions feel free to contact me

[ALERTS] MA Cross ElevenThis script is a crossing of eleven different MA, with alerts and SL and TP.
The simplest is what works best.
SMA --> Simple
EMA --> Exponential
WMA --> Weighted
VWMA --> Volume Weighted
SMMA --> Smoothed
DEMA --> Double Exponential
TEMA --> Triple Exponential
HMA --> Hull
TMA --> Triangular
SSMA --> SuperSmoother filter
ZEMA --> Zero Lag Exponential
Using "once per bar close" repaint is 0%, but if you like risk can choose "once per bar", better profit.
Thanks to JustUncleL and his amazing sripts.

Adaptive Least SquaresAn adaptive filtering technique allowing permanent re-evaluation of the filter parameters according to price volatility. The construction of this filter is based on the formula of moving ordinary least squares or lsma , the period parameter is estimated by dividing the true range with its highest. The filter will react faster during high volatility periods and slower during low volatility ones.
High smooth parameter will create smoother results, values inferior to 3 are recommended.
You can easily replace the parameter estimation method as long as the one used fluctuate in a range of , for example you can use the efficiency ratio
ER = abs(change(close,length))/sum(abs(change(close)),length)
Or the Fractal Dimension Index , in fact any values will work as long as they are rescaled (stoch(value,value,value,length)/100)
For any suggestions/questions feel free to send me a message :)


zerolag PredictiveSystemsExplanation;
www.stockspotter.com
Açıklama yukarıdaki pdf dosyasında ingilizce olarak mevcuttur.

MA Study: Different Types and More [NeoButane]A study of moving averages that utilizes different tricks I've learned to optimize them. Included is Bollinger Bands, Guppy (GMMA) and Super Guppy.
The method used to make it MtF should be more precise and smoother than regular MtF methods that use the security function. For intraday timeframes, each number represents each hour, with 24 equal to 1 day. For daily, 3 is 3 day, for weekly, 4 is the 4 weekly, etc. If you're on a higher timeframe than the one selected, the length will not change.
Log-space is used to make calculations work on many cryptos. The rules for color changing Guppy is changed to make it not as choppy on MAs other than EMA. Note that length does not affect SWMA and VWAP and source does not affect VWAP.
A short summary of each moving average can be found here: medium.com
List of included MAs:
ALMA: Arnaud Legoux
Double EMA
EMA: Exponential
Hull MA
KAMA: Kaufman Adaptive
Linear Regression Curve
LSMA: Least Squares
SMA: Simple
SMMA/RMA: Smoothed/Running
SWMA: Symm. Weighted
TMA: Triangular
Triple EMA
VWMA: Volume Weighted
WMA: Weighted
ZLEMA: Zero Lag
VWAP: Vol Weighted Average
Welles Wilder MA

Quadratic RegressionA quadratic regression is the process of finding the equation that best fits a set of data.This form of regression is mainly used for smoothing data shaped like a parabola.
Because we can use short/midterm/longterm periods we can say that we use a Quadratic Least Squares Moving Average or a Moving Quadratic Regression.
Like the Linear Regression (LSMA) a Quadratic regression attempt to minimize the sum of squares (sum of the squared difference between a set of data and an estimator), this is why
those kinds of filters have low lag .
Here the difference between a Least Squared Moving Average ( green ) and a Quadratic Regression ( red ) of both period 500
Here it look like the Quadratic Regression have a best fit than the LSMA

PRICE SATURATION INDEX / FİYAT YOĞUNLUK ENDEKSİEN: PRICE SATURATION INDEX is a momentum algorithm that measures price intensity. It helps us to determine the times when the price reaches intensity and calculates the latency in those moving averages. Moving averages have lag. The lag is necessary because the smoothing is done using past data. It shows you how to filtered a selected amount of lag from an exponential moving average (ema) and price movements. Removing all the lag is not necessarily a good thing, because with no lag, the indicator would just track out the price we were filtering, just as it is the moving average of 1 period; the amount of lag removed is a tradeoff with the amount of smoothing we are willing to forgo with golden ratio and multiline function. We show you the effects of lag removal in an indicator and then use the filter in an effective trading strategy with multiline function. The multiline function is inspired by Jhon Ehlers' zero lag formule, smooth moving average strategy and Schrödinger equation. The Schrödinger equation is a wave function based on quantum mechanics
TR: FİYAT YOĞUNLUK ENDEKSİ, fiyat yoğunluğunu ölçen bir momentum algoritmasıdır. Fiyatın yoğunluğa ulaştığı zamanları belirlememize ve hareketli ortalamalardaki gecikmeyi hesaplamamıza yardımcı olur. Hareketli ortalamalar daima gecikir. Gecikme gereklidir çünkü yumuşatma geçmiş veriler kullanılarak yapılır. Bu algoritma hem fiyat hareketlerindeki hemde üstel hareketli ortalamadaki gecikme miktarının nasıl filtreleneceğini gösterir. Tüm gecikmenin kaldırılması iyi bir şey değildir, çünkü gecikme olmadığında gösterge sadece 1 periyodun hareketli ortalaması gibi davranacağı için filtrelediğimiz fiyatı izleyecektir; filtrelenen gecikme miktarı, terk etmek istediğimiz yumuşatma miktarına alternatif bir multiline fonksiyon ve altın orana uyarlanan frekans değirinden oluşur. Bu göstergede gecikmenin ortadan kaldırılmasının etkilerini gösteriyoruz ve daha sonra filtreyi multiline fonksiyona sahip etkili bir trading stratejisi olarak kullanıyoruz. Multiline fonksiyon, Jhon Ehler'in zero lag formülü, smooth hareketli ortalama stratejisi ve Schrödinger denkleminden esinlenmiştir. Schrödinger denklemi ise kuantum mekaniğini temel alan bir dalga fonksiyonudur.
Double Exponential SmoothingSingle Exponential Smoothing ( ema ) does not excel in following the data when there is a trend. This situation can be improved by the introduction of a second equation with a second constant gamma .
The gamma constant cant be lower than 0 and cant be greater than 1, higher values of gamma create less lag while preserving smoothness.Higher values of length must be followed by higher values of gamma in order to keep the lag low.
The first smoothing part consist of a classic ema but we add s-s1 to the previous smoothed value, this will help decrease lag.The second smoothing part then updates the trend, which is expressed as the difference between the last two values.

Finite Impulse Response (FIR) FilterFinite Impulse Response (FIR) Filter indicator script.
This indicator was originally developed by John F. Ehlers (Stocks & Commodities V. 20:7 (26-31): Zero-Lag Data Smoothers).
NOTE: Ehlers' favorite FIR filter had 1, 2, 3, 3, 2, 1, 0 coefficients.
